
Our first question is: why do we need new forms of parametric curves? An immediate answer is that those parametric curves discussed in the previous unit are not very geometric. More precisely, given such a parametric form it is difficult to know the underlying geometry it represents without some further analysis. The coefficients of the equations do not have any geometric meaning, and it is almost impossible to predict the change of shape if one or more coefficients are modified. As a result, designing a curve that follows certain outline is very difficult.
In practice, designers or users usually do not care about the underlying mathematics (and equations, of course). They are more or less focusing on getting their jobs done. To do so, a system that supports users to design curves must be
This unit focuses on some techniques for curve design that can fulfill the above criteria. We shall discuss Bézier curves here, and B-spline and NURBS curves in the next two units. The unified theme of these techniques consists of the following advantages:
We shall start with the most fundamental one in this unit: the Bézier curves. Bézier curves were discovered simultaneously by Paul de Casteljau at Citroen and Pierre E. Bézier at Renault around late 50s and early 60s. Basis splines, or B-splines for short, were known and studied by N. Lobachevsky whose major contribution to mathematics is perhaps the so-called hyperbolic (non-Euclidean) geometry in late eighteenth century. However, we shall adopt a modern version developed by C. de Boor, M. Cox and L. Mansfield in late 70s. Note that Bézier curves are special cases of B-splines.
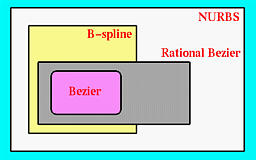
Both Bézier curves and B-splines are polynomial parametric curves. As discussed in the previous unit, polynomial parametric forms cannot represent some simple curves such as circles. As a result, Bézier curves and B-splines can only represent what polynomial parametric forms can. By introducing homogeneous coordinates making them rational, Bézier curves and B-splines are generalized to rational Bézier curves and Non-Uniform Rational B-splines, or NURBS for short. Obviously, rational Bézier curves are more powerful than Bézier curves since the former now can represent circles and ellipses. Similarly, NURBS are more powerful than B-splines. The relationship among these four types of curve representations is shown below.